
前回、現実で操作するレバー装置がちょっとグラグラしておりましたので、補強しました。
トラッカーの後ろ側に、パーツをもう一本追加し、レバーからトラッカーのまでの角度がぶれないようにしました。
触ってみた感じ、だいぶ安定したようです。
VRの方を操作してみます。
だいぶ安定した感じです。
あとは、レバーを放した時に、微妙に元の位置に戻らないのを工夫して調整すれば良さそうです。
さて、VR内もいろいろと改善していきます。
このコンテンツの中で最も重要な表現の一つが、ワイヤーの挙動のリアリティです。
これにはかなり調整を重ねていますが、なかなか難関です。
どのように難しいかといいますと、失敗例を見ていただいた方が良いと思います。
普通にワイヤーらしく動かすのはそれほど難しくないのですが、このコンテンツの中では途中から重い荷物(ドラム缶)を吊ります。
このドラム缶が、現実と同様、かなり重い設定なのですが、吊った瞬間に物理演算が崩壊して暴れる、という例です。
映像の後半は、ワイヤーの重力関係の調整をした結果、何もしないのにワイヤーが宙に浮いて行ってしまうという失敗例です。
なんとかそのあたりは、破綻の無いよう調整しました。
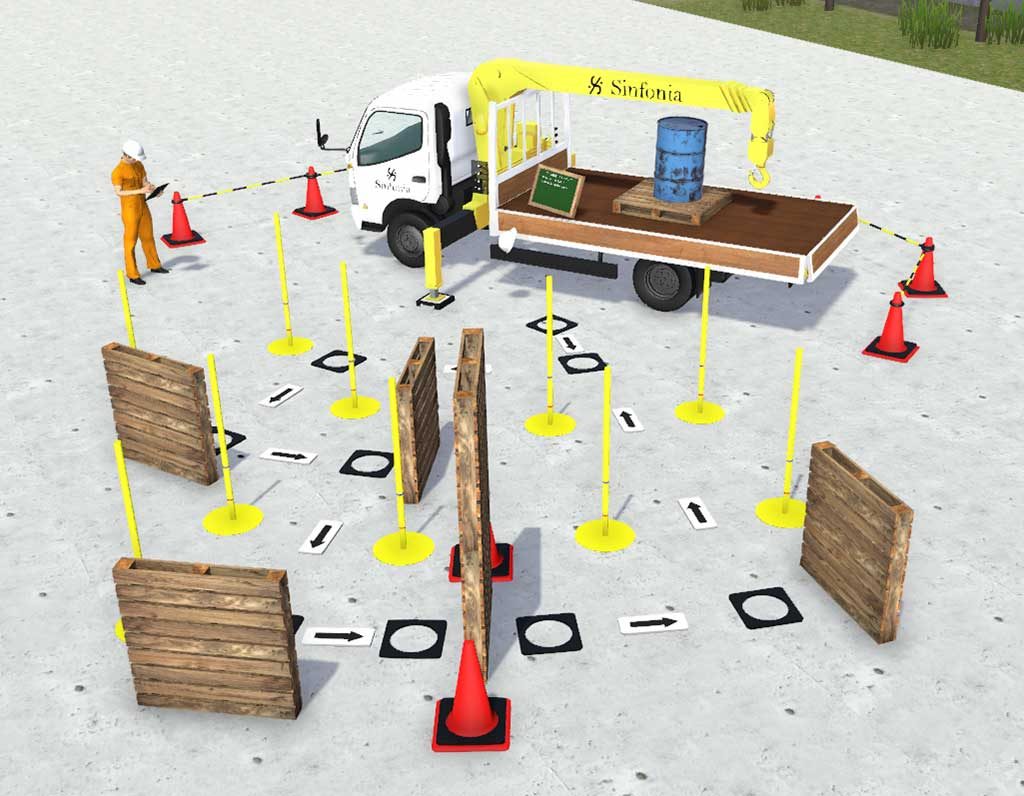
さて、次は、訓練のためのコースを作ります。
実際の技能検定では、荷を吊った後、このコースを安定させたまま移動させ、元の位置に戻すところまでを行います。
そのためのコースです。実のある訓練になるよう、技能検定と同様のコースを作成しました。

さて、コースを回る訓練をVR内で行ってみます。
この映像の画面は、訓練を監督する人が見る画面の想定です。
訓練者はVRゴーグルをかけ、監督者はPCモニターからこの画面を見ます。
左上が訓練者の見ている光景です。ちょっとパースが強くなっているので調整必要かもしれません。
右上が現場目です。分かりづらいかもしれませんが、宙に浮いている白いヘルメットが訓練者の頭の位置です。
全画面で全体の動きが確認できるような画面構成になっています。